ROS/Robotics Tutorial:
We developed a ROS/Robotics tutorial containered in docker such that the process installing ROS and other requirements is simplified. The goal of this tutorial is to give a fast and simple introduction to ROS and Robotics. The Tutorial consist of two webapps:
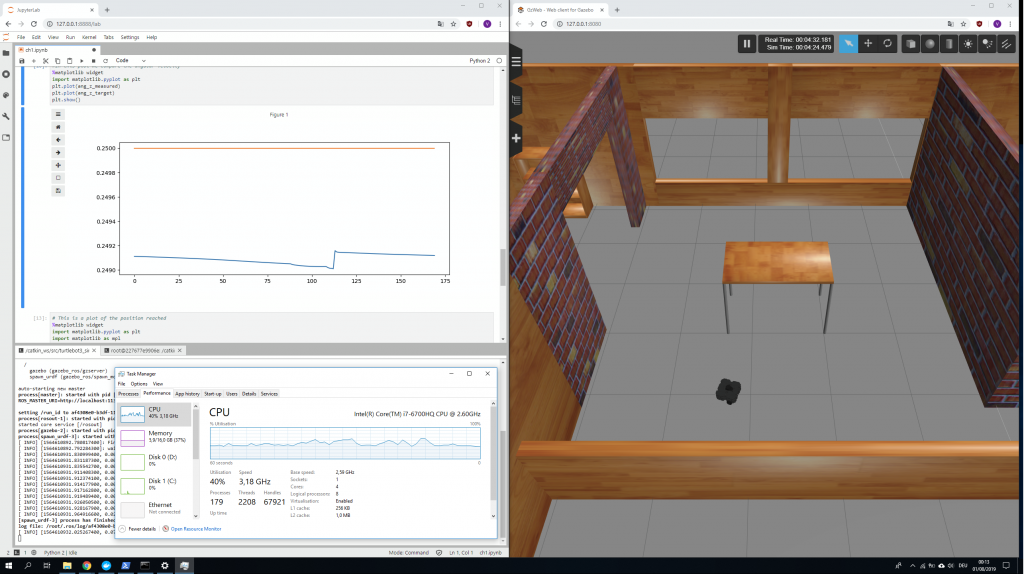
- An Jupyter Notebook where the Tutorial instructions are included and code and shells can be run.
- A Gazebo Web simulation as frontend for the simulated robot
The Tutorials source code can be found in this repo:
https://github.com/robomuc/robo_tut